In recent years, the field of autonomous driving has undergone significant changes due to the rapid development of artificial intelligence and machine learning technologies. Autopilot systems, which were previously limited to simple automated functions, are now aiming for full autonomy, which promises to upend traditional notions of driving and transportation safety. However, despite significant progress, there remain challenges that must be addressed to achieve high levels of reliability and safety for autonomous vehicles. One of the major challenges is the limited decisions made by autopilot systems in complex and unpredictable road conditions. Current autopilot systems often rely on hard-coded algorithms and rules of thumb that may be ineffective or insufficient in conditions other than those for which they were designed. This poses a safety risk because unforeseen situations on the road require the system to be able to make adaptive and flexible decisions. Deep learning, a subsection of machine learning that uses neural networks to process and analyze large amounts of data, offers a solution to this problem. Integrating deep learning into autopilot systems can significantly improve their ability to learn and adapt, which in turn will improve the safety and reliability of autonomous driving. Deep learning can help autopilot systems better understand and interpret complex sensory data, providing more accurate prediction and modeling of traffic scenarios [1].
Integrating deep learning algorithms into autopilot systems represents an advanced approach to improve their decision-making abilities. These algorithms have the potential to significantly improve autonomous vehicles by providing them with the ability to analyze and interpret complex scenarios in real time, which is a key aspect for safe driving (Figure 1).
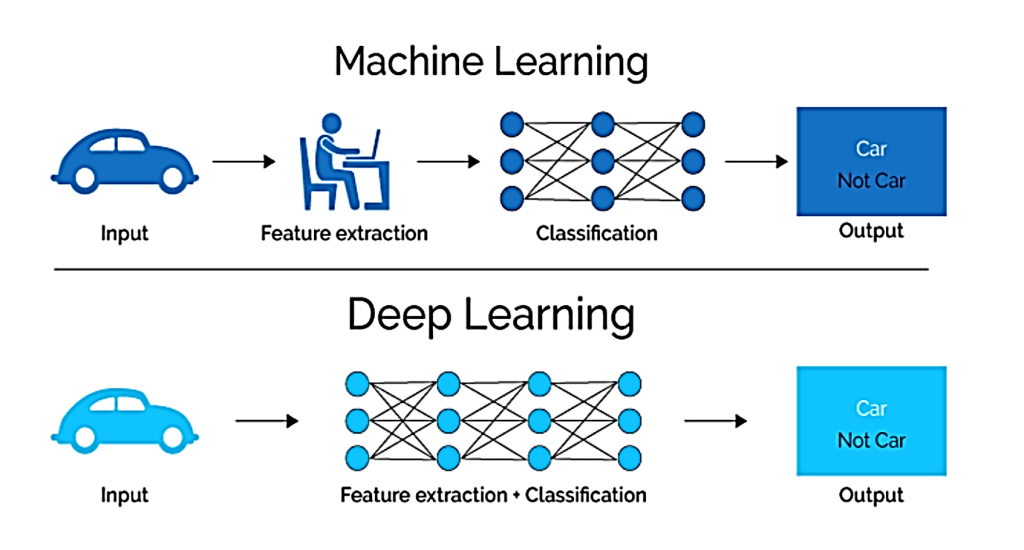
Figure 1. Fundamental difference between machine learning and deep learning.
Deep learning algorithms such as convolutional neural networks and recurrent neural networks are already demonstrating their effectiveness in computer vision and natural language processing tasks [2]. In the context of autopilot, these algorithms can analyze visual data from cameras, radar, and lidar to accurately identify objects, estimate distances, and predict potential hazards. With deep learning, autopilot systems can not only respond to standard situations on the road, but also adapt to new, unexpected conditions. For example, the system can learn to detect the behavior of pedestrians and other road users, allowing it to predict their actions and adapt the vehicle’s speed and trajectory accordingly.
An autopilot system based on deep learning typically consists of three functional layers, including a recognition layer, a perception layer, and a decision-making layer, and an additional cloud service layer (Fig. 2). In the sensing layer, heterogeneous sensors such as GPS, camera, lidar, radar, and ultrasonic sensors are used to collect real-time information about the environment, including current location and spatio-temporal data (e.g., time series of image frames). The perception layer, on the other hand, contains deep learning models to analyze the data collected by the sensor layer and then extract useful environmental information from the raw data for further processing. The decision making layer will act as a decision making module, issuing instructions relating to changing the speed and steering angle of the rudder based on the information obtained from the perception layer.
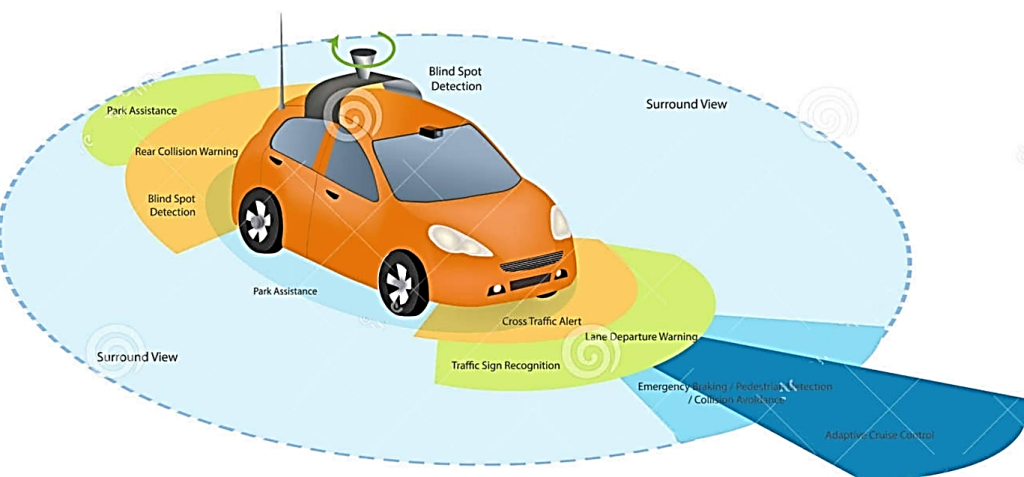
Figure 2. Architecture of the vehicle autopilot system
Recent developments in sensor technologies, data processing, and neural network architectures that contribute to the reliability of autonomous vehicles are improving at a tremendous rate. These innovations are breaking new ground for the autonomous transportation industry, promising breakthroughs in safety, efficiency, and convenience.
In the area of data processing, the advent of quantum computing promises to revolutionize the ability to process vast amounts of information, which is critical for autonomous driving systems that must analyze data from multiple sensors in real time. Heterogeneous computing systems that combine different types of processors also increase performance and energy efficiency, enabling more efficient processing of data and execution of complex algorithms. Intelligent caching algorithms and new distributed computing approaches reduce latency and accelerate data processing, which is vital for instantaneous response to changing road conditions.
In the field of sensor technology, terahertz radars represent one of the most promising areas. Terahertz radars are devices that operate at frequencies between the microwave and infrared ranges of the electromagnetic spectrum, i.e. between 0.1 and 10 terahertz. Their specialty is their ability to penetrate opaque materials such as clothing, cardboard, wood, fog, clouds and even brick walls, making them ideal for covert object detection. Due to their short wavelength, terahertz radars can detect very small objects and fine surface details, which is impossible for traditional radars. They can detect objects hidden behind obstacles, which can be useful for avoiding potential hazards on the road. Terahertz radars are effective even in low visibility conditions such as fog, rain or snow.
In the field of neural networks, spike neural networks offer a new level of performance by mimicking more closely the workings of the human brain. Spike neural networks are the third generation of neural networks that attempt to mimic the workings of the brain more closely than traditional neural networks. Unlike conventional neural networks that use continuous values to convey information, this type uses discrete events or “spikes” that are more computationally and energy efficient. They promise to significantly reduce energy consumption in machine learning tasks, making them ideal for deployment in mobile systems such as autonomous vehicles. Transformers, neural networks that have made great strides in natural language processing, are now being adapted for computer vision tasks in autonomous vehicles, providing highly accurate object recognition and scene understanding [3]. These technologies together provide the foundation for the next generation of autonomous vehicles that will be able to not only drive themselves, but also interact with their environment more intelligently and safely than ever before.
Autopilot in a vehicle relies on a suite of radars to ensure the safety and accuracy of its operation. Long-range radars are mounted on the front of the vehicle and detect objects up to 200-250 meters away, which is critical for adaptive cruise control functions and maintaining a safe gap to vehicles ahead. Near-field radars with a range of up to 30 meters are placed in the corners of the vehicle to help detect objects in blind spots, and are also used to assist with parking and warn of potential collisions at low speeds. Medium-action radars complement the system by detecting objects at distances of up to 60-80 meters, which is especially important at high speeds. There are also terahertz radars, which stand out for their ability to detect objects with high accuracy due to the use of the terahertz frequency range [4].
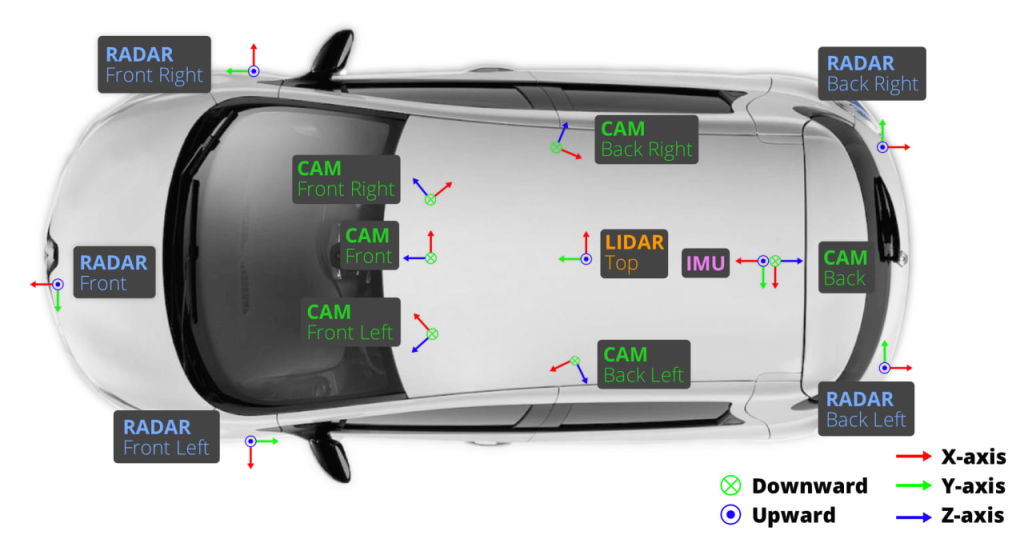
Figure 3. Scheme of equipment location and direction of action
These radars complement each other to create a multi-layered detection system that is part of a broader multi-sensor system that also includes cameras, lidars, and ultrasonic sensors (Figure 3). Integrating data from all these sources through the sensor fusion process allows the autopilot to gain a comprehensive and accurate view of the road environment, which is a key aspect to ensure the safety of autonomous driving.
In conclusion, the study showed that integrating deep learning into autopilot systems is key to improving the safety and reliability of autonomous driving. Deep learning, through its ability to process and interpret large amounts of data with high accuracy, enables autonomous driving systems to better understand and predict different scenarios on the road. Deep learning algorithms trained on huge datasets are able to recognize pedestrians, other vehicles and obstacles with a high degree of accuracy [5]. This allows the autopilot system to make more informed and informed decisions in real time, which significantly reduces the risk of accidents. In addition, the use of deep learning facilitates the adaptability of autonomous systems to constantly changing road conditions and the behavior of other road users. Autopilot systems equipped with self-learning capability can continuously improve their algorithms, thereby increasing their efficiency and safety over time. However, it should be noted that despite the significant potential of deep learning, there are challenges associated with ensuring the safety and reliability of such systems. These challenges include data security issues, the potential for systems to be hacked, and the need to create regulatory standards to regulate and certify autonomous driving systems. Thus, continued research in deep learning, improvements in algorithms and technologies, and the development of rigorous safety and ethical standards will play an important role in the continued development and deployment of autonomous vehicles.
References
1. Ищенко, Т. В. Системы автономного вождения для беспилотных автомобилей: технологии, методы и перспективы развития / Т. В. Ищенко, А. Е. Зусс, Е. Р. Мысева // МСИ: 10 лет подготовки кадров для международной системы ПОД/ФТ : Материалы IX Международной научно-практической конференции Международного сетевого института в сфере ПОД/ФТ. – Москва: Национальный исследовательский ядерный университет МИФИ, 2023. – С. 903-908.2. Зайдуллин, Р. Б. Анализ основ автоматизации технологических процессов на компьютерных платформах / Р. Б. Зайдуллин, О. В. Борисова // Концепция устройства современного мира в эпоху цифры : Сборник научных трудов по материалам II Международного научного форума. – Москва: Центр развития образования и науки, ООО "Издательство АЛЕФ", 2024. – С. 80-85.
3. Бикбулатов, Р. И. Оценка актуальности и эффективности использования интеллектуальных систем в логистической сфере / Р. И. Бикбулатов, О. В. Борисова // Современная наука: актуальные проблемы теории и практики. Серия: Естественные и технические науки. – 2024. – № 1. – С. 24-27. – DOI 10.37882/2223-2966.2024.01.05. – EDN GWDJER.
4. Беспилотные автомобили / М. А. Крюкова, А. А. Атишева, А. В. Мартынов, Е. Е. Бурдин // СТУДЕНЧЕСКИЙ НАУЧНЫЙ ФОРУМ 2022 : сборник статей IV Международной научно-практической конференции. – Пенза: Наука и Просвещение (ИП Гуляев Г.Ю.), 2022. – С. 68-71.
5. Зверев, М. О. Угрозы и преимущества технологии автономного вождения / М. О. Зверев // Технологические инновации и научные открытия : Сборник трудов по материалам XI Международного конкурса научно-исследовательских работ. – Уфа: ООО "Научно-издательский центр "Вестник науки", 2022. – С. 51-58.