Abstract: The article is devoted to the study of the implementation processes of automated transport robots in multi-zone warehouse complexes as a key direction for improving the efficiency of logistics infrastructure in the context of the digital economy. The current state of the global and Russian markets for robotic warehouse solutions, the classification of automated transport robots (AGV, AMR, FMR, shuttles, sorting systems), as well as their functional capabilities and application scenarios in various warehouse zones are disclosed. The organizational and economic stages and features of implementing robotic systems are substantiated, including the analysis of design, integration, and operation procedures. The main prospects, constraints, and problems accompanying the robotization of warehouse complexes are specified. Conclusions are made about the impact of robotization on the development of the industry and regional economy, associated with increased productivity and quality of logistics operations, optimization of labor resources, and acceleration of the digital transformation of warehouse activities.
Keywords: automated transport robots; multi-zone warehouse complexes; warehouse robotics; logistics automation; logistics robotization.
На протяжении последних лет наблюдается активное развитие технологий автоматизации складской логистики. Характерным трендом складирования является фокусирование внедряемых инноваций на деятельности многозональных складских комплексов, т.е. крупных распределительных центров, разделенных на несколько функциональных или температурных зон; с учетом происходящей цифровизации, таковые все чаще становятся объектом именно роботизации. Применение автономных транспортных роботов на складах, как признается, позволяет повысить эффективность операций, сократить зависимость от ручного труда и минимизировать человеческий фактор [6; 9; 11; и др.]. Стремительное развитие электронной коммерции и усложнение цепочек поставок в совокупности определили повышение требований к скорости и точности обработки грузов, что предопределяет необходимость внедрения робототехники в деятельность складов. Кроме того, особую актуальность данный вопрос приобретает на фоне дефицита рабочих кадров в логистике предприятия – роботизация рассматривается в качестве способа поддержать и нарастить операционную деятельность.
Учитывая системное значение указанных вопросов, масштабы цифровой трансформации в целом и роботизации складской логистики, в частности, приобретают беспрецедентный характер. По существующим оценкам Global Market Insights, глобальный объем рынка складской робототехники достиг около 14,7 млрд. долл. США к концу 2024 года (Рисунок 1).
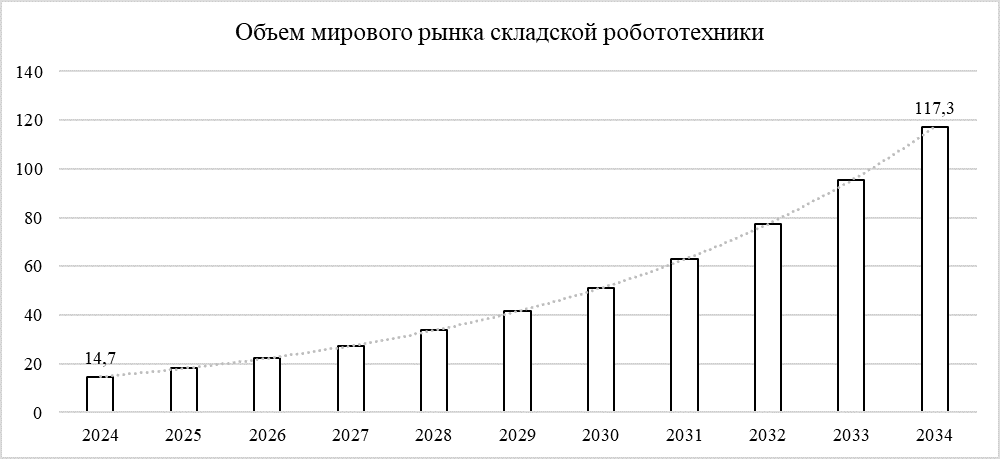
Рис. 1 – Динамика и объем мирового рынка складской робототехники, млрд. долл. США, прогноз [2]
Согласно существующим прогнозам, рынок будет увеличиваться со среднегодовым темпом роста 23,1% и достигнет к 2034 году объема в 117,3 млрд. долл. США. Стремительный рост и динамика рынка будут обусловлены стимулирующим воздействием перехода к интеллектуальным складам. Не менее существенным катализатором ускоренного роста является экспансия электронной коммерции и повышение требований к скорости выполнения заказов, поскольку именно компании в сфере онлайн-ритейла и 3PL-логистики инвестируют в роботизацию складов, что необходимо для компенсации дефицита рабочей силы и возрастающих ежегодно расходов на оплату труда персонала [2; 5].
С позиции структуры рынка наибольшее значение приобретают автономные мобильные роботы, на долю которых в 2024 году приходилось 22,3% от его объема. За ними следуют автоматизированные управляемые транспортные средства (крупногабаритные платформы, используемые на промышленных складах для перемещения тяжелых грузов), которые по прогнозам к 2034 году займут до 1/5 от всего рынка складской робототехники. И примерно такая же доля на современном этапе приходится на сегмент роботизированных манипуляторов, которые используются для автоматизации упаковки, паллетирования и сортировки [2].
Для национального рынка роботизации складов формируется более противоречивая ситуация, поскольку общие трансформационные процессы находятся на начальной стадии. По существующим оценкам, лишь около 80 складов в стране оснащены робототехникой, что составляет 5,9% от всех современных складских площадей. Тем не менее, доля роботизированных складов постепенно увеличивается – крупные логистические операторы и ретейлеры активно инвестируют в автоматизацию, и ожидается, что к 2027 году число роботизированных складов увеличится примерно на 30%. Наиболее высокий спрос на робототехнику прослеживается в сферах электронной коммерции, продовольственного ритейла, фармацевтики и производственной логистики, в которых фактическая нагрузка на склады, а как следствие и потребность в автоматизации, максимальна [3]. Согласно совместному исследованию компаний «Яндекс Роботикс» и «Промышленная робототехника», 87,5% средних и крупных российских компаний рассматривают внедрение мобильных роботов на складах, причем 71,4% предприятий планируют закупить 10 и более таких машин [1]. Отметим, что отечественный рынок развивается при участии как зарубежных игроков, так и российских разработчиков; на протяжении 2024-2025 гг. реализовывались пилотные проекты с использованием десятков роботов на складах ведущих ритейлеров (например, эксплуатация транспортных роботов и сортировщиков на складах маркетплейса Wildberries) [4].
Учитывая сформировавшиеся объективно обстоятельства функционирования решений в области автоматизации и роботизации складской логистики, стоит рассмотреть особенности и перспективы их внедрения применительно к национальным реалиям. Так, как было отмечено нами ранее, под многозональными складскими комплексами понимаются современные логистические объекты, организованные по принципу функционального зонирования пространства, в которых все этапы обработки грузов разделены на самостоятельные технологические зоны, объединенные в единую систему управления на основе цифровых технологий. Основными компонентами многозонального складского комплекса выступают следующие (Рисунок 2):
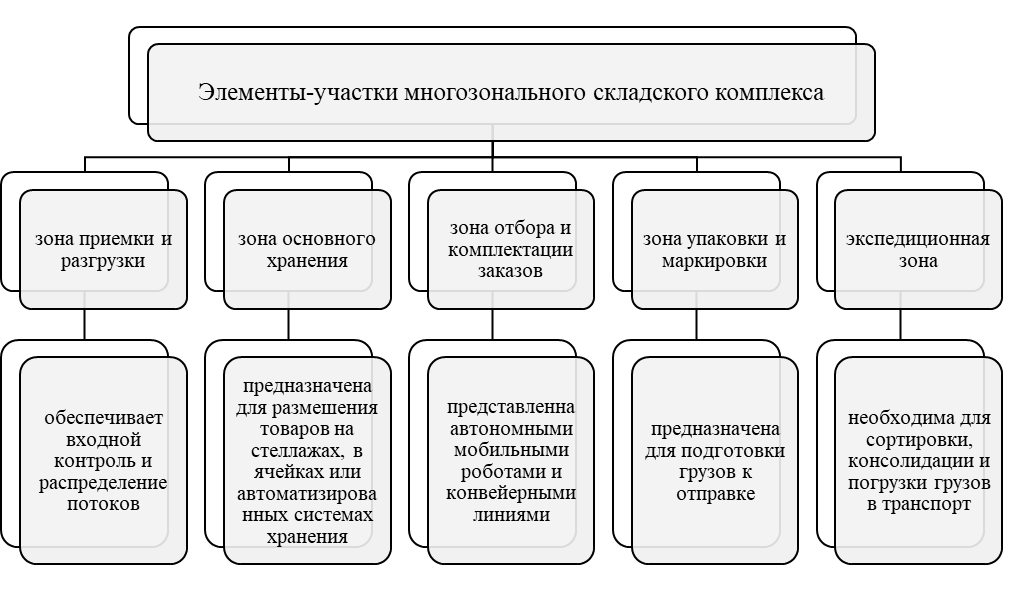
Рис. 2 – Элементы-участки многозонального складского комплекса, составлено автором
С точки зрения современных технологий, в функционировании многозонального складского комплекса могут быть задействованы множественные технологические решения, к которым можно отнести следующие (Таблица 1):
Таблица 1
Основные типы автоматизированных транспортных роботов, применяемых в работе многозонального складского комплекса
| Тип робота | Основные характеристики | Основные функции |
| Automated Guided Vehicles (автоматические управляемые транспортные средства) | Перемещаются по заранее заданным маршрутам с использованием навигационных меток (магнитные ленты, отражатели, провода в полу); работа зависит от специально оборудованных путей; не способны отклоняться от маршрута | Перевозка тяжелых грузов (палет, поддонов) без участия человека |
| Autonomous Mobile Robots (автономные мобильные роботы) | Оснащены лидарами, камерами и датчиками; работа обходится без навигационных меток; строят маршрут динамически; безопасно взаимодействуют с людьми | Доставка стеллажей и контейнеров по принципу «товар к человеку»; внутренняя транспортировка грузов |
| Forklift Mobile Robots (автономные погрузчики) | Самоходные вилочные погрузчики без водителя; имеют систему навигации и безопасности; управляются на программном уровне | Подъем, перемещение и штабелирование палет; автоматизация погрузочно-разгрузочных операций |
| Automated Storage and Retrieval Systems (автоматизированные системы хранения и выдачи) | Небольшие тележки-шаттлы, перемещаются по многоуровневым стеллажам; работают совместно с лифтами и конвейерами | Автоматизированное хранение и выдача коробов и поддонов; оптимизация плотности хранения |
| Сортировочные роботы | Специализированные мобильные устройства; автономная навигация по заданным направлениям; интеграция с WMS | Автоматическая сортировка товаров и посылок по направлениям или адресам отгрузки |
| Манипуляторы и вспомогательные роботы | Роботизированные руки, стационарные или мобильные; оснащены системами захвата и позиционирования | Захват, перекладка, укладка и палетирование коробок и товаров; комплектование заказов |
Источник: составлено автором по данным [7; 9; 10; 12 и др.]
Отметим, что каждый из представленных типов роботов может выполнять характерный спектр задач в функционировании многозонального складского комплекса; вместе с тем, именно автономные транспортные роботы оказываются перспективными с точки зрения организации основных складских функций. Роботы используются для перемещения товаров от зоны разгрузки до зоны хранения; например, автономные вилочные погрузчики забирают поддоны с входящего груза и перевозят их на стеллажи без участия человека, что закономерно ускоряет процесс приемки и снижает трудозатраты на начальном этапе обработки грузов. Причем в многозональном комплексе роботы перемещают грузы между различными участками; AMR-роботы могут курсировать между зонами хранения охлажденных товаров зоной упаковки, что увеличивает их продуктивность работы. Один из наиболее эффективных сценариев предполагает, что роботы доставляют товары непосредственно к рабочему месту комплектовщика, т.е. фактически замещают перемещения человека (нередко хаотичные, неорганизованные или более длительные относительно машины, которую отличает повышенная безопасность). Мобильные платформы перевозят стеллажи с необходимым товаром к сотруднику, который отбирает позиции по заказу, что позволяет обслуживать больший объем заказов без расширения площадей и штата сотрудников. Аналогично в зонах сортировки роботы могут автоматически распределять товарные потоки со скоростью около тысячи посылок в час (производится перевоз посылок к ячейкам по направлениям доставки) [6; 8; 11 и др.].
Таким образом, фактически автоматизированные транспортные роботы встраиваются во все операции склада и позволяют улучшить их путем автоматизации; при этом роботы функционируют круглосуточно и синхронизируются с технологической базой склада, например с системой управления складом. Дополнительно могут производиться улучшения работы роботов, связанные с интеллектуализацией маршрутов, совершенствованием операций или выполняемых задач. В целом внедрение автоматизированных транспортных роботов осуществляется итеративно, в ходе чего выполняется несколько сменяющих друг друга и впоследствии циклично воспроизводящихся стадий (Рисунок 3).
На первом этапе проводятся первичная оценка и обоснование внедрения – анализ действующих логистических процессов, определяются узкие участки, на которых автоматизация обеспечит наибольший экономический и организационный эффект. Далее формулируются технические требования, выбирается тип роботов (AGV, AMR, FMR и др.) и система управления складом (WMS/WCS), разрабатывается архитектура взаимодействия оборудования. Производится реализация проекта в ограниченном масштабе с целью проверки корректности технологических и управленческих решений; роботы подключаются к единой цифровой системе управления, проводится настройка взаимодействия с персоналом и обучение сотрудников работе с новой техникой. После успешного тестирования роботизированная система расширяется до расчетного уровня, охватывает все целевые зоны складского комплекса. На заключительном этапе осуществляется постоянный контроль ключевых показателей эффективности, анализируются данные эксплуатации, формируются меры по улучшению производительности и обеспечению готовности системы к изменяющимся условиям работы.
![]()
Рис. 3 – Структура этапов внедрения автоматизированных транспортных роботов, составлено автором
Отдельно стоит отметить необходимость учета специфики многозональных складов при внедрении автоматизированных транспортных роботов, поскольку они должны быть готовы к работе в разных условиях. Требуется обеспечить безопасное взаимодействие людей и машин в целях чего наносится разметка, настраиваются зоны замедления и остановки перед участками с персоналом. Каждая зона склада может внедряться поэтапно, с постепенной роботизацией (сначала автоматизируются наиболее типовые и повторяемые операции, затем более сложные), что закономерно снижает риски и позволяет обеспечить готовность персонала к работе с новыми технологиями.
Закономерно, внедрение автоматизированных транспортных роботов связывается с характерными перспективами, развивающимися как на микроуровне, так и с привязкой к региональной экономической системе (Рисунок 4). Как можно заметить, внедрение роботизированных систем на складах является многоуровневым процессом, который охватывает экономические, технологические и социальные эффекты. При этом максимизация положительного влияния возможна при условии преодоления инвестиционных и кадровых барьеров, а также при поддержке локальных разработчиков.
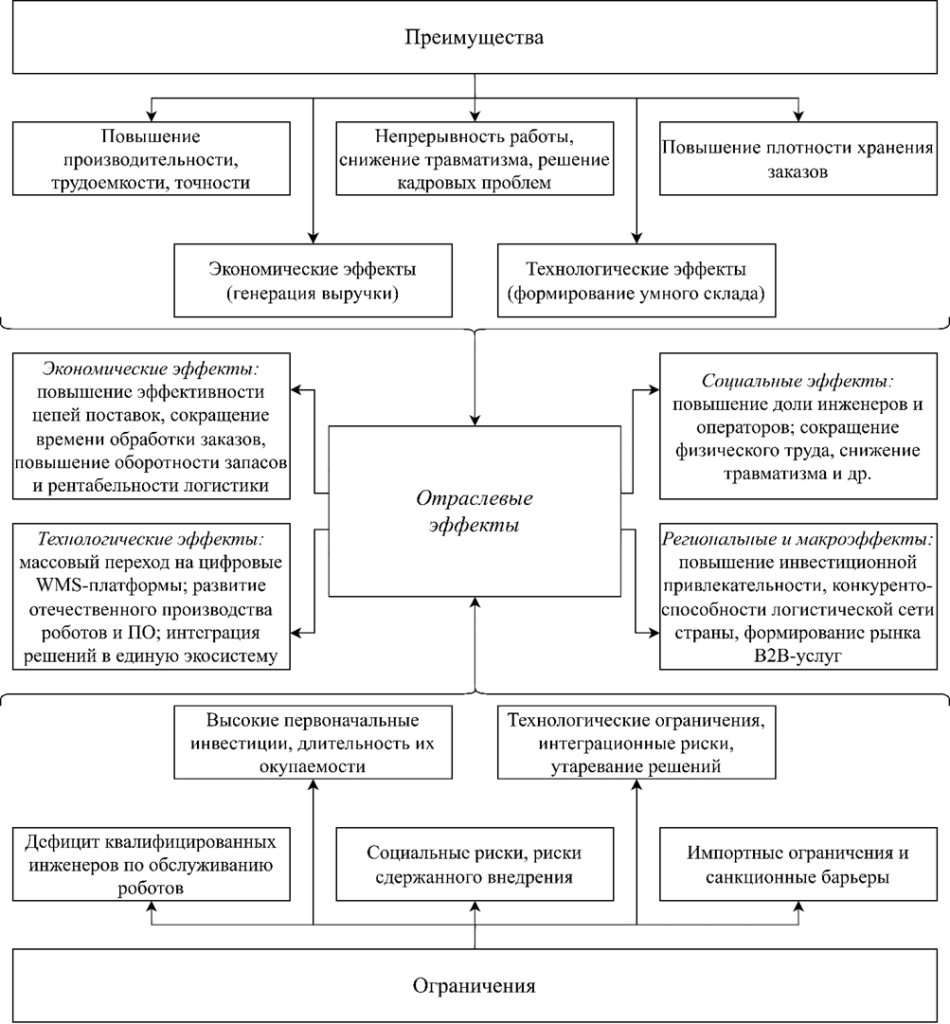
Рис. 4 – Перспективы, ограничения и отраслевые эффекты роботизации складов путем внедрения автоматизированных транспортных роботов, составлено автором
Таким образом, роботизация многозональных складских комплексов выступит неизбежным этапом развития логистической отрасли в условиях цифровой экономики, причиной чему является то, что автоматизированные транспортные роботы способны существенно повысить эффективность складских операций, снизить издержки и повысить качество обслуживания клиентов. Мировой опыт подтверждает существенный экономический эффект от внедрения соответствующих решений; поэтому в национальных реалиях, несмотря на существующие барьеры, крупные игроки продолжат инвестиции в пилотные проекты.
References
1. Большинство опрошенных компаний планируют использовать мобильных роботов на складах [Электронный ресурс]. – Режим доступа: https://www.sostav.ru/publication/bolshinstvo-oproshennykh-kompanij-planiruyut-ispolzovat-mobilnykh-robotov-na-skladakh-76620.html (Дата обращения: 07.10.2025).2. Размер рынка складской робототехники [Электронный ресурс]. – Режим доступа: https://www.gminsights.com/ru/industry-analysis/warehouse-robotics-market (Дата обращения: 08.10.2025).
3. Рынок автоматизации складов показывает рост [Электронный ресурс]. – Режим доступа: https://www.kommersant.ru/doc/7941978 (Дата обращения: 10.10.2025).
4. Wildberries тестирует роботов на складе «Коледино» [Электронный ресурс]. – Режим доступа: https://logistics.ru/avtomatizaciya-logistiki-skladirovanie/wildberries-testiruet-robotov-na-sklade-koledino (Дата обращения: 10.10.2025).
5. Amazon launches a new AI foundation model to power its robotic fleet and deploys its 1 millionth robot [Электронный ресурс]. – Режим доступа: https://www.aboutamazon.com/news/operations/amazon-million-robots-ai-foundation-model (Дата обращения: 06.10.2025).
6. Zhang, J., Yang, X., Wang, W., Guan, J., Ding, L., Lee, V.C.S. Automated guided vehicles and autonomous mobile robots for recognition and tracking in civil engineering / J. Zhang, X. Yang, W. Wang [et al.] // Automation in Construction. – 2023. – Vol. 146. – 104699. – DOI: 10.1016/j.autcon.2022.104699.
7. Fraifer, M.A., Coleman, J., Maguire, J., Trslić, P., Dooly, G., Toal, D. Autonomous Forklifts: State of the Art—Exploring Perception, Scanning Technologies and Functional Systems—A Comprehensive Review / M.A. Fraifer, J. Coleman, J. Maguire [et al.] // Electronics. – 2025. – Vol. 14. – No. 1. – P. 153. – DOI: 10.3390/electronics14010153.
8. Zhang, H., Long, P., Zhou, D., Qian, Z., Wang, Z., Wan, W. An autonomous forklift research platform for warehouse operations / H. Zhang, P. Long, D. Zhou [et al.]. – Massachusetts Institute of Technology, Department of Electrical Engineering and Computer Science. – 2018. – Режим доступа: https://hdl.handle.net/1721.1/121621(Дата обращения: 07.10.2025).
9. Zhang, H., Long, P., Zhou, D., Qian, Z., Wang, Z., Wan, W. DoraPicker: An Autonomous Picking System for General Objects / H. Zhang, P. Long, D. Zhou [et al.] // arXiv. – 2016. – DOI: 10.48550/arXiv.1603.06317.
10. He, Z., Zhang, X., Jones, S., Hauert, S., Zhang, D., Lepora, N.F. TacMMs: Tactile Mobile Manipulators for Warehouse Automation / Z. He, X. Zhang, S. Jones [et al.] // IEEE Robotics and Automation Letters. – 2023. – Vol. 8. – No. 8. – P. 4729–4736. – DOI: 10.1109/LRA.2023.3287363.
11. Krnjaic, A., Steleac, R.D., Thomas, J.D., Papoudakis, G., Schäfer, L., To, A.W.K. Scalable Multi-Agent Reinforcement Learning for Warehouse Logistics with Robotic and Human Co-Workers / A. Krnjaic, R.D. Steleac, J.D. Thomas [et al.] // IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). – 2024. – DOI: 10.48550/arXiv.2212.11498.
12. Ellithy, K., Salah, M., Fahim, I.S. AGV and Industry 4.0 in warehouses: a comprehensive analysis of existing literature and an innovative framework for flexible automation / K. Ellithy, M. Salah, I.S. Fahim [et al.] // International Journal of Advanced Manufacturing Technology. – 2024. – Vol. 134. – P. 15–38. – DOI: 10.1007/s00170-024-14127-0.